Parker ETH Cylinder
There is no"one size fits all" drive train linear actuator technology for every application. In reality, the selection of different types of linear motion systems depends entirely on what is most critical to a specific application. While choosing to use a lead screw seems straight forward, choosing between ball and roller screws can be daunting. You can simplify the linear actuator selection process by approaching the application systematically and applying an actuator performance calculator.
To choose the proper technology, consider quantifying metrics rather than relying upon product labeling and initial perception.
Application Example
This chart represents an application requiring 1000 lbs of continuous thrust, over a 10-inch stroke, moving at 12 in/sec at 100% duty cycle. In this application, the objective is to maximize the life of a particular actuator. Given the high-duty cycle of this application, this analysis will focus on electric cylinder screw options of similar pitch and packaging.
These proposed actuator solutions will be evaluated:
Ball screw: Parker ETH 80 M10 with a 95 mm square frame
Roller Screw: "Competitor A" with a 102 mm square frame
Load Versus Life Graph
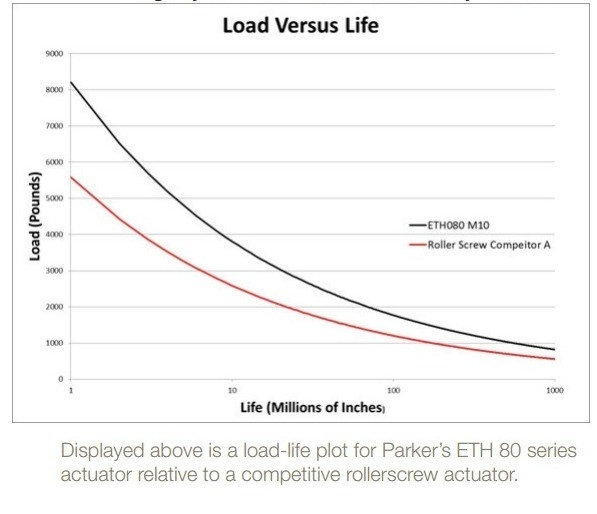
The load-versus-life comparison demonstrates that the ball screw actuator, though slightly smaller in size, actually has a longer expected life than the similar roller screw actuator. This is largely due to the optimized packaging of the ball screw within the actuator body. The ball screw design advantage is also greater when cost is considered.
This kind of analysis makes the choice of a ball screw linear actuator selection over a roller screw straightforward.
Follow this engineering approach to choose the right linear actuator for your application:
Step 1 - Identify relevant actuator performance metrics
Performance metrics are quantifiable outputs that measure the appropriateness of one technology (in this case, actuator) over another for an intended application. Metrics that benefit your application such as actuator life should be maximized; metrics that hinder your application—such as cost—should be minimized.
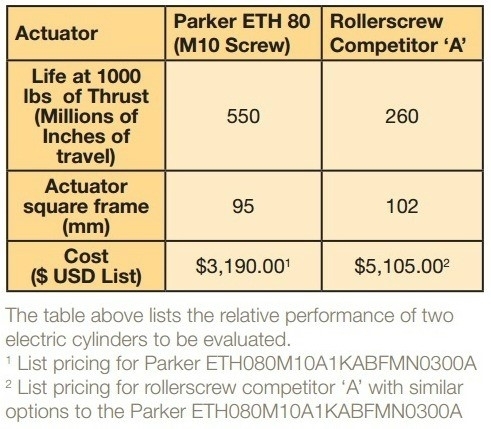
In the application example, three metrics were examined: actuator life, actuator frame size and cost.
Step 1 Table
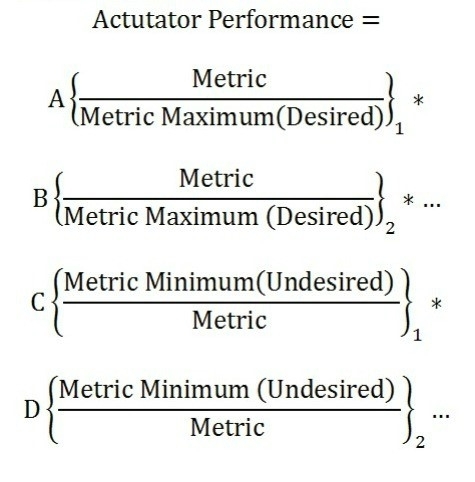
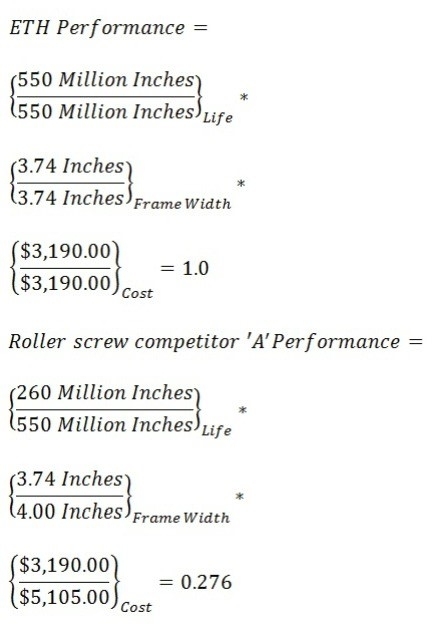
Step 2 - Apply the actuator performance equation for each solution
A simple performance calculation is useful for quantifying the relative performance of each actuator solution. Characteristics that are ideally maximized, such as actuator life, are input in the numerator. Characteristics that are ideally minimized, such as cost, are input in the denominator, with the minimum across all actuator solutions input as the numerator.
Calculations
Step 3 - Score it
This calculation takes into account each critical aspect of actuator performance and quantifies it. Weights can be applied to each of the metrics by assigning the coefficients A, B, C, and D a relative value. Using this equation with no weights, the best solution should yield the score closest to 1.
This calculation can also be used to weight one metric higher than another. Given this model, the higher the performance score, the more ideal the actuator. Using the application example, as well as the metrics of life, frame width, and cost with even weight, results in the following calculations:
Calculations
Although these screws might seem to have similar performance on paper, once their relative performance is weighed using the actuator performance calculator as a selection guide, the collective differences become evident.
Other Considerations
Aside from performance and cost issues, consider the ease of sourcing. Ball and lead screws are readily available, but there are very few manufacturers of roller screws. When designing a motion system application in a global market, availability may be a deciding factor. With few manufacturers in limited locations, look for a reliable manufacturer with a global footprint.
Learn more about Parker's ETH series high-force electric cylinders.
Call us today at (855) 737-4716 to learn more, or fill out our online form and someone will get back to you.