Trying to size and space the electrical components before the mechanics are defined can lead to wasted time and rework.
High-performance mechatronic systems require a complex interplay of electrical and mechanical systems to accomplish increasingly demanding tasks. The problem? Mechanical engineers and electrical engineers are often educated within their single area of expertise and simply don't communicate as much as they should when designing electromechanical systems—an oversight that can lead to higher costs and less reliable performance.
Most any engineer involved in the sizing, selection and start-up of mechatronic systems will encounter these problems both during the design phase and in the field. To help bridge the gap between electrical and mechanical engineers, here are five important things for electrical engineers to consider in the design of mechatronic systems.
Consideration #1: Total cost of ownership is everything
It really goes without saying that mechatronic systems should be designed to achieve the best possible performance for the lowest cost over the long term. However, the need to document cost-savings on an annual basis (rather than over the lifetime of the system) can be a powerful motivation for engineers to look for less expensive components to keep the up-front cost of the mechatronic system low.
Image
Using less expensive couplings may save money in the short term, but if the required stiffness is not achieved, redesigning and retrofitting the motor mounting system can easily cost three or more times the money you initially saved with the economy coupling. Plus, you'll have the added cost of downtime and lost production, which is not a good trade-off. Total Cost of Ownership (TCO) is really the single most important consideration in any mechatronic system design, and the four remaining points will also contribute, ultimately, to lower TCO.
Consideration #2: Always look at the mechanics first
It's very important for electrical engineers to get involved in, or at least understand, the mechanical design of a mechatronic system before forging ahead with the electrical design and controls. Trying to size and specify the electrical components before the mechanics are defined can lead to wasted time and rework since parameters such as inertia and torque are heavily influenced by the choice of mechanical components.
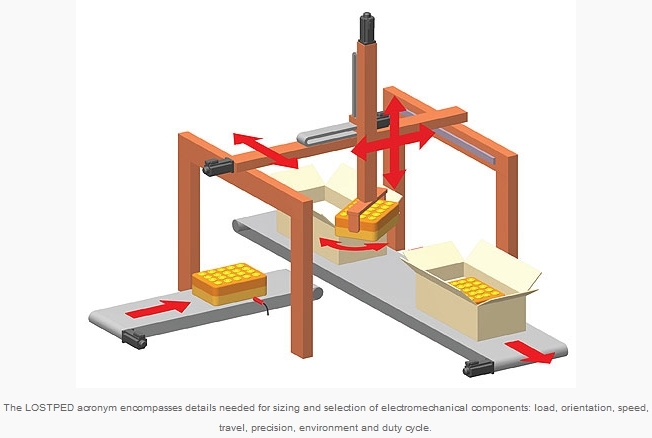
Bosch Rexroth engineers use a system called LOSTPED to help them size and select the mechanical components that are best matched to the performance requirements of the application. LOSTPED is simply an acronym that stands for Load, Orientation, Speed, Travel, Precision, Environment and Duty Cycle. In short, it's a systematic review of all the performance and design attributes that need to be considered, with the end goal being the optimum system design for each application.
Image
It's human nature to want to use components that are in stock or that the user is familiar with, such as motors, drives, and controls that have been used on other machines—but each system deserves its own review to ensure that the components and the overall system are optimized for cost and performance. Otherwise, you may leave money on the table or fail to get the system performance you need.
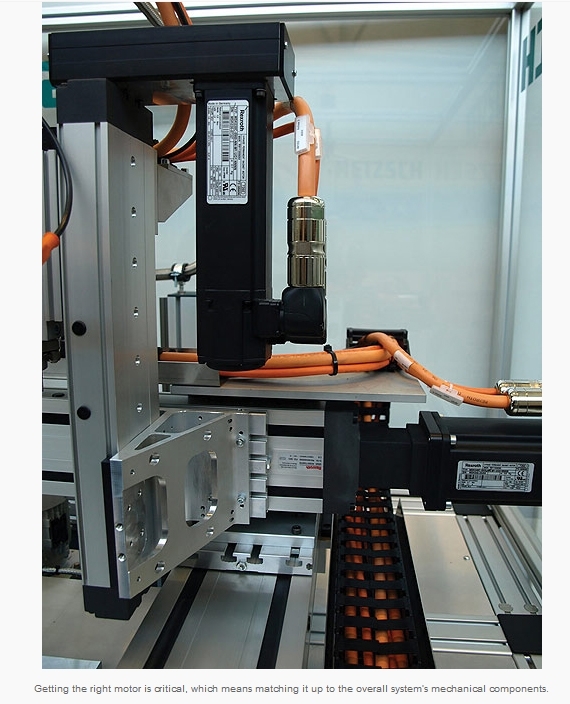
Consideration #3: Don't try to fit a square peg into a round hole
The last example is common enough that it's worth emphasizing as an important consideration of its own: Don't try to fit a square peg into a round hole. Many electrical engineers are familiar with particular motors and drives or are pressured to save money by using components they already have. Using a motor that's physically too large, however, can cause mounting issues. It could supply too much torque for the linear module to handle (causing mechanical failure or breakage), or it could cause inertia and settling issues.
Unpredictable settling can be a particular problem in precision applications, such as dispensing, pin insertion, or precision assembly in semiconductor and medical applications. If the motor is oversized and has too much inertia, the actuator may have a difficult time achieving the desired position, resulting in longer overall cycle times than required.
Image
Particularly in precision applications, you should try to size the mechanical and electrical components to achieve as close to a 1-to-1 inertia match as possible. Keeping power consumption to the minimum required for the application is also important for customers who are looking to reduce their environmental impact and make their manufacturing operations more green.
Consideration #4: Don't forget "jerk"
"Jerk" is the rate of change of acceleration, or the build-up of the acceleration of the axis. Think of the sensation you feel when you take off up the next hill on a roller coaster. It's the limitation of the jerk parameter (how fast you're accelerating) that lets you experience the acceleration of the roller coaster without developing whiplash.
Acceleration is important in mechatronic applications for achieving the desired move in the required time, but if the jerk (how fast the system accelerates) is too high, vibrations could result and cause a loss of positioning or premature wear of components. On the other hand, if electrical system designers don't consider the magnitude of jerk required for the application, the motor may be undersized and not allow achievement of the required performance.
Consideration #5: Cables must be managed
Cable management is one of the most frequently overlooked attributes in mechatronic systems. Don't make this mistake—it can be costly. Cables and cable tracks require physical space, and fast, multi-axis motion often requires cables that can handle tight bends and high-duty cycles.
Image

Particularly when designing the cable management system, theoretical operation, and space requirements can be very different from what is required in the real world. Once installed in the machine or factory, the system's active environment may include adjacent machinery, factory walls, posts or beams, and other parts or tooling that cause interference with the cable management system. Proper strain relief for cables is also critical because cables that are bent and twisted beyond their specifications pose a safety hazard in the form of fire or short circuits.
It all adds up to TCO
The ultimate goal in the design of any electromechanical system should be to achieve the optimum performance, mechanically and electrically, to get the job done with the lowest total cost. In the real world, many such systems are designed by teams of engineers from both disciplines, working in tandem.
This is the ideal model, but with the discipline of mechatronics being relatively young, the problems described here happen all too often, because few mechanical or electrical engineers have the experience or understanding of their counterparts in the other discipline. The five tips above aim to help bridge this gap and prevent costly, unwelcome, and time-consuming surprises. And thousands of dollars in long-term savings by reducing the total cost of ownership? Who can be opposed to that?
Article featured in www.mechatronictips.com.